
Sensors for the Scribbler 2 Robot
A Scribbler 2 robot has numerous sensors for detecting the world. The MyroC library provides a full range of functions, with multiple ways to access the data. Each function allows values of the sensor to be queried several times with an average value returned.
The following figures indicate which functions reference which sensors.
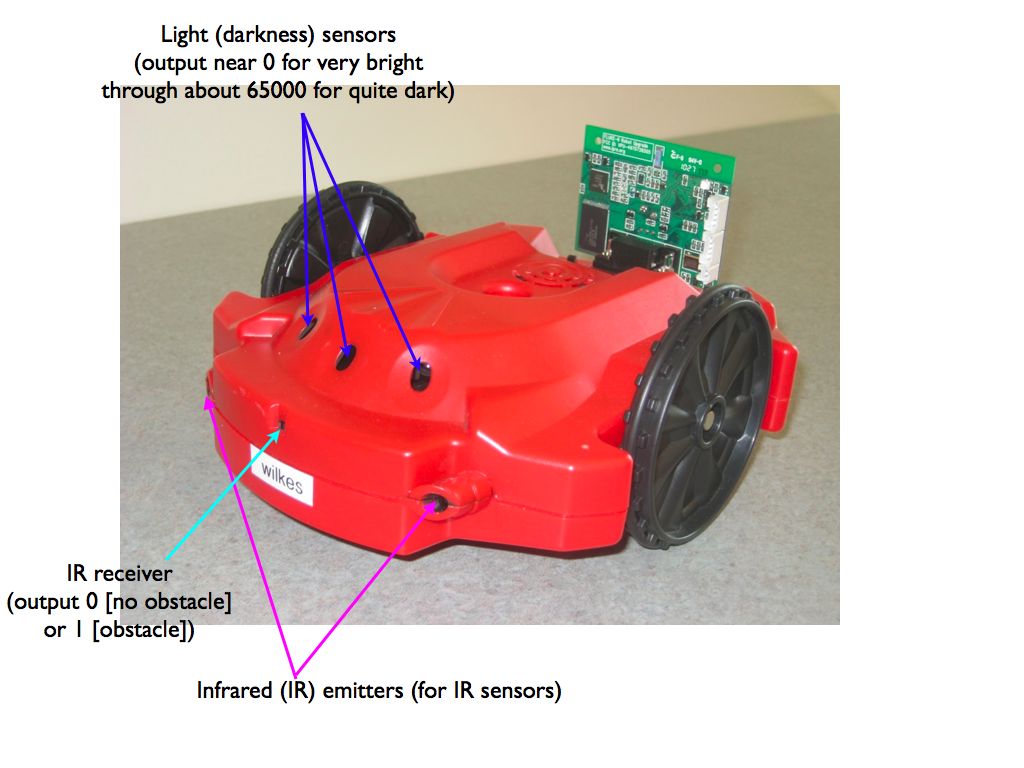
Scribbler forward
| Sensor Set | Vector Function | Text Functions | Values Returned | Typical Variability | Comments | |
|---|---|---|---|---|---|---|
| Light Sensors (really darkness sensors) | int vals[3] int n; /*sampleSize*/ rGetLightAll(vals, n); |
int n; /*sampleSize*/ rGetLightTxt("left", n); rGetLightTxt("middle", n); rGetLightTxt("right", n); | bright light returns values near 0; dark areas return large integers (about 65535) | under 5%-10% | bright, direct light needed for small-value results | |
| IR Scribbler Sensors | int vals[2] int n; /*sampleSize*/ rGetIRAll(vals, n); |
int n; /*sampleSize*/ rGetIRTxt("left", n); rGetIRTxt("right", n); | output 0 indicates no obstacle; output 1 indicates obstacle | substantial variation likely; sample several times for average | light must reflect from emitter to receiver, so obstacle must be a 4-6 inches away | |
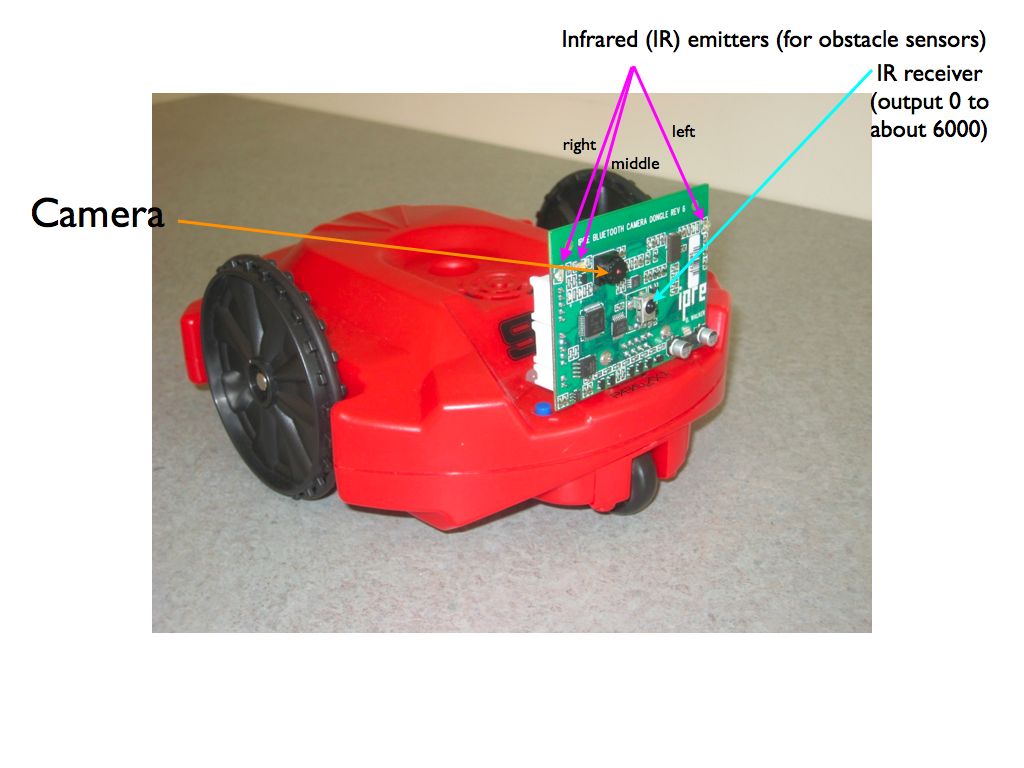
Fluke forward
| Sensor Set | Vector Function | Text Functions | Values Returned | Typical Variability | Comments | |
|---|---|---|---|---|---|---|
| Obstacle Sensors | int vals[3] int n; /*sampleSize*/ rGetObstacleAll(vals, n); |
int n; /* sampleSize */ rGetObstacleTxt("left", n); rGetObstacleTxt("middle", n); rGetObstacleTxt("right", n); | values near 0 indicate no obstacle (no light reflected
from emitters) large integers (near 6,000) indicates obstacle | substantial variation possible; sensor values degrade as battery degrades | value returned depends upon battery strength and output;
level of emitters (set by rSetIRPower(level), where level in range 0,
255)
| |
| Virtual Light Sensors | int vals[2]; int n; /* sampleSize */ rGetBrightAll(vals, n); |
int n; /* sampleSize */ rGetBrightTxt("left", n); rGetBrightTxt("right", n); | values near 0 represent bright light; values may extend to about 65535 for very dark region | variation of 5000-10000 common | averaging encouraged for modest consistency | |
|
created 19 March 2012 by Henry M. Walker revised 25 March 2012 by Henry M. Walker revised (developmental library added) 23 January 2014 by Henry M. Walker revised (old functions removed) 3 November 2014 by Henry M. Walker revised as a dynamic, php page 20 January 2018 by Henry M. Walker |
|
